|
HRBB4: Indoor Image Data for Visual Odometry/SLAM
|
|
Yan Lu, Dezhen Song
|

|
|
Introduction
|
|
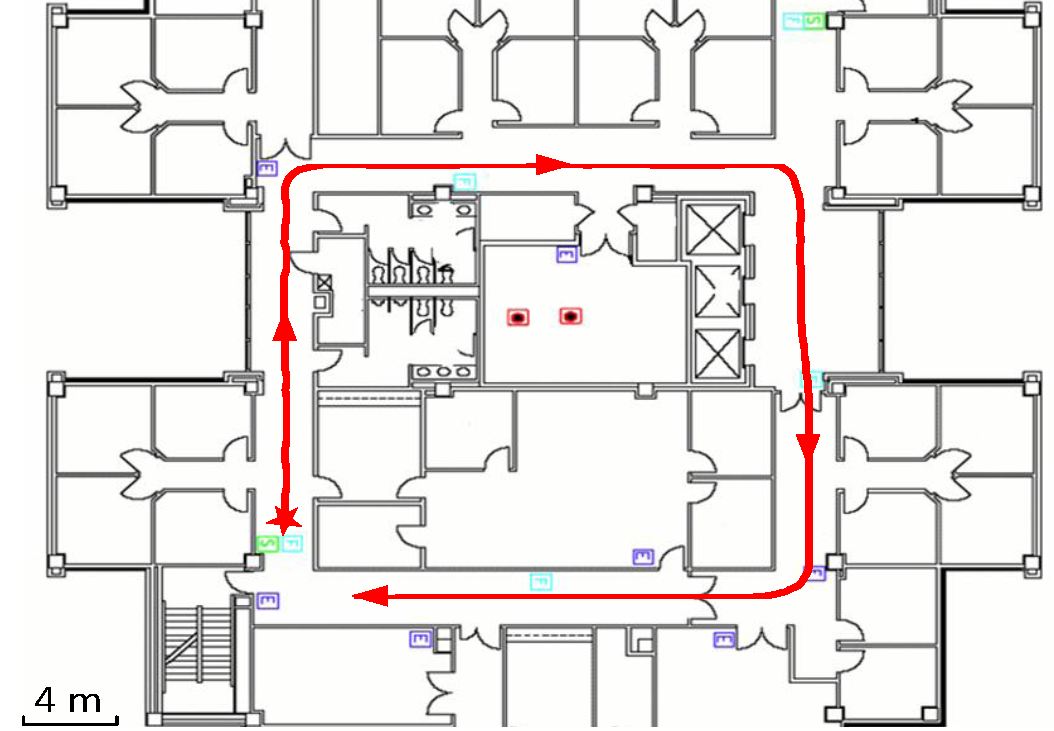
This dataset is provided for testing visual odometry/SLAM systems in typical office corridor scenarios.
The images are recorded using a Nikon 5100 camera mounted on a PackBot on the 4th floor of H.R. Bright Building, Texas A&M University.
The trajectory length is around 70 m. The ground truth of camera positions is also provided.
|

|
|
|
Download (zip)
|
The image sequence consists of 12,000 frames of 640 x 360 pixels. Ground truth of camera positions is also included.
Download as a zip (4GB) file.
|
|
Related publications
|
Please cite our work if you use this dataset in your research.
- Yan Lu, Dezhen Song, and Jingang Yi. "High Level Landmark-Based Visual Navigation Using Unsupervised Geometric Constraints in Local Bundle Adjustment", IEEE International Conference on Robotics and Automation (ICRA), 2014
|
|
Credits
|
|
Hancheng Ge, Changyoung Kim, and Wen Li.
|
|
Links
|
|
Multilayer Feature Graph,
Netbot Lab
|