






















| |
|
|
| |
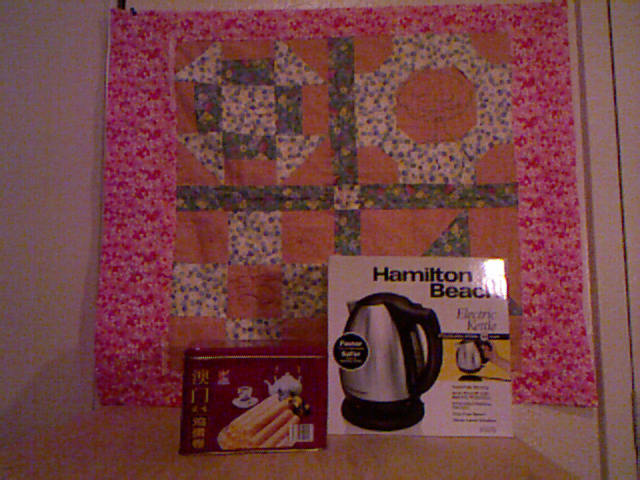
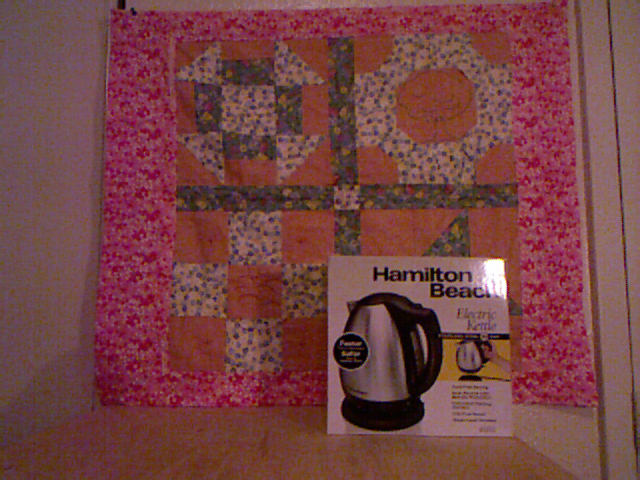
| This page lists our RGB-D datasets collected for testing visual odometry/SLAM performance under lighting variations. The data have been recorded using a Microsoft Kinect (for Xbox 360). Its intrinsic K = [525 0 319.5 ; 0 525 239.5 ; 0 0 1.0]; distCoeffs = [0,0,0,0]. |
|
Image Pairs (zip file)
|
||
|
|
|
|
| Pair 1 | Pair 2 | |
|
|
|
|
| Pair 3 | Pair 4 | Pair 5 |
|
|
|
|
| Pair 6 | Pair 7 | Pair 8 |
|
|
|
|
| Pair 9 | Pair 10 | Pair 11 |
|
|
|
|
| Pair 12 | Pair 13 | Pair 14 |
|
|
|
|
| Pair 15 | Pair 16 | Pair 17 |
| Sequences | ||
| Corridor-A [constant lighting] (1.5GB) | Corridor-A [varying lighting] (1.8GB) | |
| Corridor-B [constant lighting] (1.4GB) | Corridor-B [varying lighting] (1.1GB) | |
| Corridor-C [constant lighting] (1.7GB) | Corridor-C [varying lighting] (1.8GB) | |
| Staircase-A [constant lighting] (1.6GB) | Staircase-A [varying lighting] (1.9GB) | |
| Staircase-B [constant lighting] (1.5GB) | Staircase-B [varying lighting] (1.7GB) | |
| Staircase-C [constant lighting] (1.2GB) | Staircase-C [varying lighting] (1.1GB) | |
| Entry-Hall [constant lighting] (1.2GB) | Entry-Hall [varying lighting] (1.1GB) | |
| Auditorium [constant lighting] (1.4GB) | Auditorium [varying lighting] (1.4GB) | |
| Links | ||
| Netbot Lab | ||